CrankShaft Prosthetic Project Overview

Description
This project involved the design, fabrication, and testing of a mechanical muscle interface. This interface converts the discrete, linear motion of muscles to continuous, rotational motion for constant power generation.
While biological systems operate mostly at high torque, low speed, and with discrete movements, engineered systems often operate at low torque, high speeds, and with continuous rotation. Engineered systems also provide more efficient power output. The question is, therefore, how we can use a biological system to actuate an engineered system, and how such a combination performs compared to a purely engineered system. More specifically, how would a muscle-actuated motor outperform a motor-gearbox combination. Building off of simulations and initial designs, I worked to design and prototype such a system. A part of the challenge was making the system as light and small as possible so that a rat can be used as the test subject. Furthermore, being on the length scale of a few millimeters meant that conventional manufacturing techniques were quite difficult to implement when fabricating this device.
Mechanical Design and Fabrication

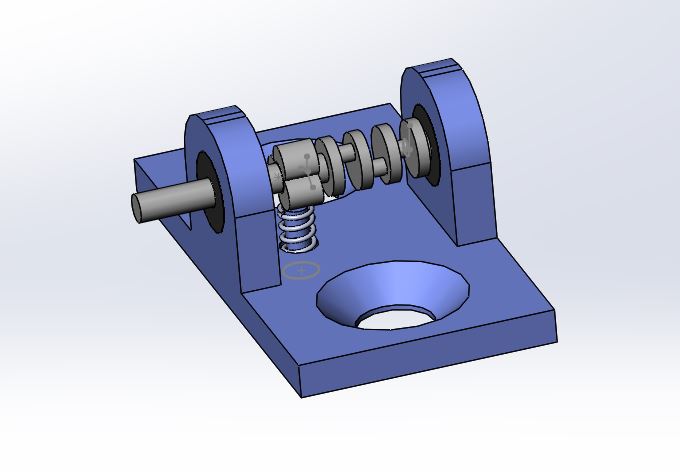
Designing the Mechanisms
- Design for structural stability at mm length scales
- Design around computationally determined values for CAM shapes and length parameters
- Design based on previously known data acquired for rat muscle pull forces
Precision Manufacturing Process
- Needs to be extremely accurate to the model or the spring-CAM mechanism will not drive the shaft properly
- Use CNC mill and lathe runs along with various setups to machine crankshafts and holders
Data Acquisition and Analysis
Live Animal Testing
- Conduct tests on rats after promising results seen through mechanical testing
- Develop stimulation protocols for rat testing procedures
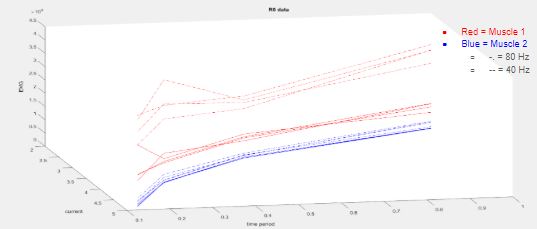
Data Analysis
- Data processing and analysis using matlab
- Filtering through EMG data to find relevant trends